
课题进度02
课题进度02-双平台单目标跟踪仿真
使用双平台单目标被动纯方位角跟踪,目标做匀速直线运动,采用扩展卡尔曼滤波。
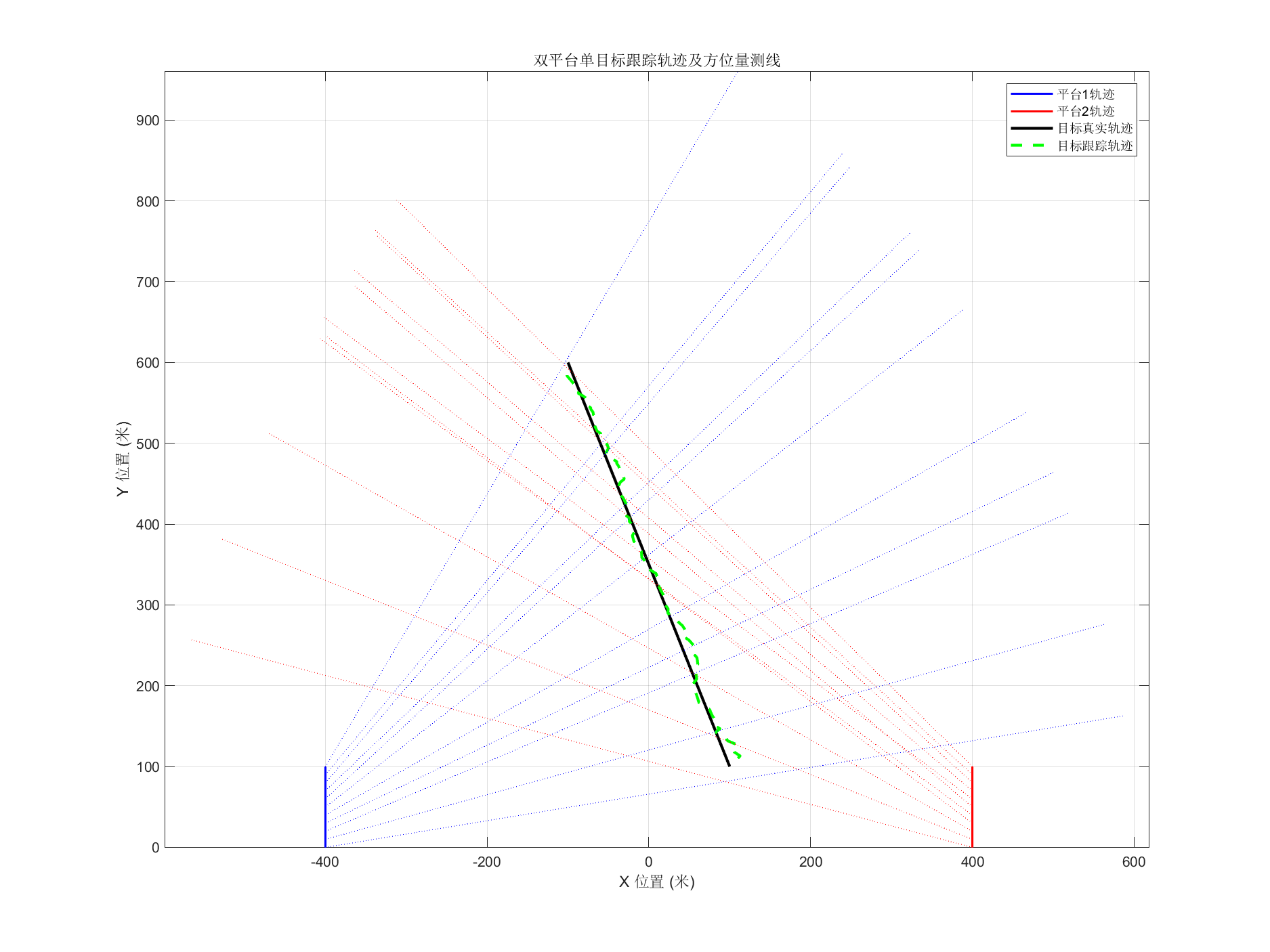
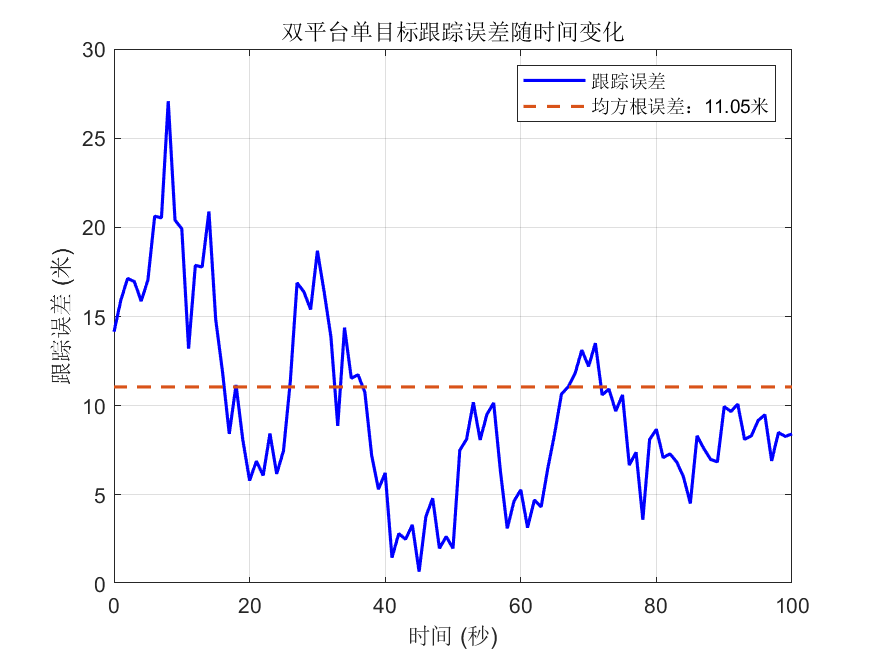
跟踪误差的大小不仅取决于传感器的精度,还取决于目标与两个平台相对位置的几何形状
纯方位跟踪:
理想情况:当两个平台与目标形成的夹角接近90°时,定位最准,误差最小
糟糕情况:当目标运动到两个平台的连线附近,或者目标与两个平台的夹角变得非常小(趋于 0°或 180°)时,几何形状发生“退化”。
图中在19s左右出现的误差高峰,可能是因为目标恰好穿过了两个平台连线的延长线方向。在这个瞬间,两个方位角几乎平行,算法很难通过两条几乎平行的线交汇出准确的点。
几何精度因子(GDOP):
平台的几何分布影响最终的跟踪误差。
数学表达式:
- H 是观测矩阵(雅可比矩阵),描述测量值对状态的敏感度
- RR 是测量噪声协方差矩阵
- (HTR−1H)−1(HTR−1H)−1 是估计协方差矩阵的一部分,反映了定位不确定度
GDOP 越小,定位精度越高;GDOP 越大,定位精度越差。
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来源 XiaoCai's Blog!
相关推荐

2026-01-28
课题进度01
课题进度01-双平台纯方位目标跟踪使用双平台被动纯方位角跟踪,目标做匀速直线运动,采用扩展卡尔曼滤波。 1. 参数设置采样周期:1s 总仿真时间:100s 平台1位置:(-400,0),单位:m;速度:(0,1),单位:m/s 平台2位置:(400,0),单位:m;速度:(0,1),单位m/s 两个平台向正北方向前进 目标初始状态(x, y, vx, vy):(100,100,-2,5),朝着西北方向前进。 2. 扩展卡尔曼滤波首先介绍一下卡尔曼滤波(KF),它是将一个系统的观测值和预测值进行贝叶斯融合,得出一个最优估计,但是针对的只是线性系统,所以对于非线性系统就需要用到扩展卡尔曼滤波(EKF)。 扩展卡尔曼滤波(EKF) 用一阶泰勒展开将非线性系统近似为线性系统,然后在这个线性化的系统中使用传统的卡尔曼滤波进行状态更新。 状态转移方程(系统模型): x_k=f(x_{k-1},u_{k-1})+w_{k-1}观测方程(测量模型): z_k=h(x_k)+v_k$x_k$:系统在第k步的状态向量 $u_{k-1}$:控制输入 $w_{k-1}$:过程噪声,假设服从零均值,协...

2026-03-19
课题进度04
课题进度04-滤波算法对比1. 无迹卡尔曼滤波(Unscented Kalman Filter, UKF)定义: 是一种适用于非线性系统的滤波算法,被看作是扩展卡尔曼滤波(EKF)的改进版本,解决了 EKF 在处理强非线性系统时的精度低或不稳定问题。 基本思想: UKF 的核心思想是使用一组经过精心选择的采样点(称为 sigma 点)来统计地近似非线性系统的传播特性,而不是像 EKF 那样通过一阶泰勒展开对非线性函数进行线性化处理。 这些 sigma 点经过非线性系统的传播后,UKF 使用这些点的加权求和来估计状态和协方差,而无需显式计算雅可比矩阵。 数学框架: (1)状态模型 UKF 适用于如下的离散非线性系统模型: 状态转移方程: \mathbf{x}_{k} = f(\mathbf{x}_{k-1}, \mathbf{u}_{k-1}) + \mathbf{w}_{k-1} 观测方程: $\mathbf{z}_{k} = h(\mathbf{x}_k) + \mathbf{v}_k$ 其中 $\mathbf{x}_k$是状态变量 $\mathbf{u}_k$是控制输...

2026-03-19
课题进度03
课题进度03使用均方根误差(RMSE)来描述跟踪误差。 1. 已知目标的真实轨迹(理论分析/仿真时)假设你在某一时刻 kk 对目标的位置估计值是(x_k,y_k),而目标的真实位置是(x_k^{true},y_k^{true}) 第一步:计算单点误差 该时刻的定位误差平方为: \text{误差平方}_k=(x_k-x_k^{true})^2+(y_k-y_k^{true})^2第二步:计算累积后的均方根误差 如果你进行了 N 次独立的蒙特卡洛仿真,或者在某一时间段内有 N 个时刻的跟踪数据,那么位置均方根误差的计算公式为: 2. 不知道目标的真实轨迹(实际工程中)在真实的水下跟踪场景中,我们往往无法知道目标的确切位置(如果知道了就不需要跟踪了)。这种情况下,我们无法直接使用上面的公式。此时,均方根误差通常被用来衡量滤波器输出本身的稳定性,即一致性。 在这种情况下,计算依据的是滤波器提供的协方差矩阵 P_k 第一步:提取协方差 卡尔曼滤波或粒子滤波在给出位置估计(\hat{x}, \hat{y}) 的同时,还会给出一个协方差矩阵,它描述了滤波器对自己估计结果的“不确定度”。 对于二...